

Beiträge von Arris
-
-
...... ich habe ähnliches.... hast du ein = ?
Gruß
Thomas
-
bin wieder raus. Werde heute abend noch mal da sein.
-
hänge ein weinig bei mir im Livebasteln rum wer reinkommen will sehr gerne..
-
sehr schön, ich denke das wird super aussehen.


-
Hi ja die Motoren laufen nur verdreht das ist nich mein problem, (Kabel kann man drehen und ändern) die x und y Werte sind nicht da und der Takt stimmt auch irgendwie nicht
-
Shadow-aSc was für bekloppte Spinner es gibt. Hoffe die erwischen den Penner.
Gruß Thomas
-
schon klar. Aber der Userport hat in dem Fall nichts mit dem Joystickport Paddles zu tun. Die Wandlung der Analogsignale findet auf dem FT-Interface statt aber die sind nicht auf den Userportstecke gerootet worden von Matthias. Aber baut es doch alle auf und probiert es selber. Ich werde auf jeden Fall kein einzigen Cent da mehr rein stecken oder irgendwelche arbeit. Zumal der Roboteranschluss auch noch verdreht ist.
-
wie auch immer x und y Poti laufen nicht. 0 . und es fehlt ein Pin und das ist einfach schade weil die andere große Platine hat alle Pins
-
nein, so einfach ist es dann doch nicht. Im orginalen sind j und h sehr wohl belgt mit Trigger x und Trigger y
Quelle: https://www.ftcommunity.de/
-
Hi, ja das kann möglich sein. Aber ich weis nicht ob ich das angehen werde.
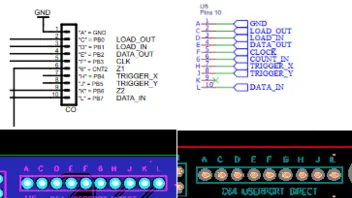
Links blau die alte große Platine 10 Pins rechts 100x100 nur 9 Pins ich glaube ich will das nicht mehr machen und lieber mit dem Hammer drauf rumprügeln.
-
Nein und Nein
-
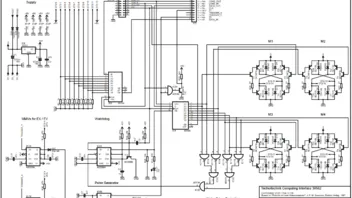
Hi baut die Dinger von Matthias nicht auf. Die haben noch viele Fehler. Bzw. habe ich die 100x100 noch nicht zu laufen bekommen. X und Y Werte gehen nicht Steckerbelegung passt nicht sowohl zum Roboter als auch zum C64 Userport.
-
Dann hat man aber Controlport BAD
-
Hast du mal einen Würfel mit 20 x 20 x 20 mm gedruckt und nachgemssen ?
Ich habe das ganze schon auf 2 verschiedenen Drucker gedruckt und das passt hervorragend ineinander.
Gruß
Thomas
-
Ich denke da die ersten Kabel funktioniert haben solltes du auch dabei bleiben. Wer weiß was Matthias bzw Commodore da gedacht haben intern.
Da Matthias ja bekannt ist für seine kreative Ader bei Belegungen wäre ich skeptisch. Sind denn die Testergebnisse die gleichen ?
Gruß
Thomas
-
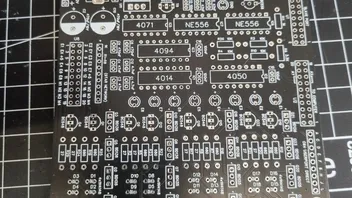
Heute so aus China angekommen.
100 x 100 mm 5 Stück. Werde heue mal eine aufbauen und testen.
Gruß
arris
-

1541 Transfer aufgebaut und mit CBM Transfer getestet.
die Firmware habe ich mit Programmers Notepat kompiliert.

ich hänge die hier mal an weil bei UNI64 gibt es die nicht.

Erstmal eine neue Disk für meinen FT Roboter erstellt. Es war noch nie so einfach D64 zuück auf Disk zu schreiben.
Unter Vice wird das Laufwerk auch erkannt.
läuft unter Windows 11
Gruß
Tommy
-
ja, fertig und getestet.
-
wieder da